
[GIS] 지도 디자인 및 타일맵 가공툴, Mr.Tiler-Xr v2.0
미스터타일러는 지오서비스에서 개발한 맵디자인툴입니다. 서비스에 맞는 지도를 디자인하고 이렇게 디자인된 지도를 인터넷 상에서 빠르게 서비스할 수 있도록 타일맵으로 가공해 주는 툴입니다.
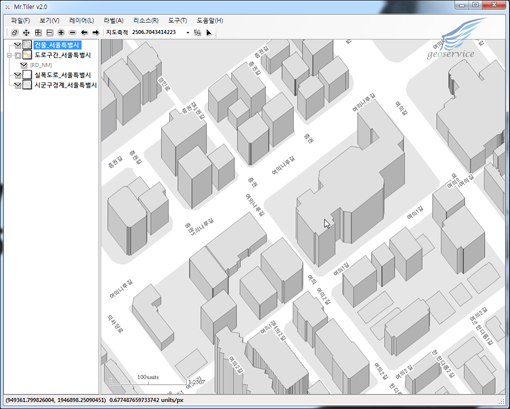
위의 화면은 타일맵을 통해 4개의 수치지도레이어(SHP 파일형태)를 이용해 미스터타일러(Mr.Tiler-Xr)로 만들어본 지도입니다. 위의 지도를 디자인하는 과정에 대한 데모는 다음 URL을 통해 동영상으로 살펴보실 수 있습니다.
Mr.Tiler-Xr 실행 동영상(http://www.gisdeveloper.co.kr/Mr.Tiler-Xr/mrtiler_demo1)
미스터 타일러는 듀라맵(DuraMap-Xr)을 통해 개발되었습니다. 그리고 UI는 .NET 프레임워크인 C#으로 개발되어져 있으므로 .NET 프레임워크 2.0이 설치되어져 있어야 합니다. 미스터 타일러와 듀라맵은 지오서비스 홈페이지의 자료실을 통해 다운로드 받으실 수 있습니다.