이미지에 대한 Classification 및 Detection, Segmentation에 대한 신경망 모델을 구성하는 레이어 중 Convolution 관련 레이어의 결과값에 대한 시각화에 대한 내용입니다. 딥러닝 라이브러리 중 PyTorch로 예제를 작성했으며, CNN 모델 중 가장 이해하기 쉬운 VGG를 대상으로 하였습니다.
먼저 필요한 패키지와 미리 학습된 VGG 모델을 불러와 그 레이어 구성을 출력해 봅니다.
import matplotlib.pyplot as plt
from torchvision import transforms
from torchvision import models
from PIL import Image
vgg = models.vgg16(pretrained=True).cuda()
print(vgg)
결과는 다음과 같습니다.
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
.
.
(생략)
위의 특징(Feature)를 추출하는 레이어 중 0번째 레이어의 출력결과를 시각화 합니다. PyTorch는 특정 레이어의 입력 데이터와 그 연산의 결과를 특정 함수로, 연산이 완료되면 전달해 호출해 줍니다. 아래는 이에 대한 클래스입니다.
class LayerResult:
def __init__(self, payers, layer_index):
self.hook = payers[layer_index].register_forward_hook(self.hook_fn)
def hook_fn(self, module, input, output):
self.features = output.cpu().data.numpy()
def unregister_forward_hook(self):
self.hook.remove()
LayerResult은 레이어의 연산 결과를 검사할 레이어를 특정하는 인자를 생성자의 인자값으로 갖습니다. 해당 레이어의 register_forward_hook 함수를 호출하여 그 결과를 얻어올 함수를 등록합니다. 등록된 함수에서 연산 결과를 시각화하기 위한 데이터 구조로 변환하게 됩니다. 이 클래스를 사용하는 코드는 다음과 같습니다.
result = LayerResult(vgg.features, 0)
img = Image.open('./images/cat.jpg')
img = transforms.ToTensor()(img).unsqueeze(0)
vgg(img.cuda())
activations = result.features
위의 코드의 마지막 라인에서 언급된 activations에 특정 레이어의 결과값이 담겨 있습니다. 이제 이 결과를 출력하는 코드는 다음과 같습니다.
fig, axes = plt.subplots(8,8)
for row in range(8):
for column in range(8):
axis = axes[row][column]
axis.get_xaxis().set_ticks([])
axis.get_yaxis().set_ticks([])
axis.imshow(activations[0][row*8+column])
plt.show()
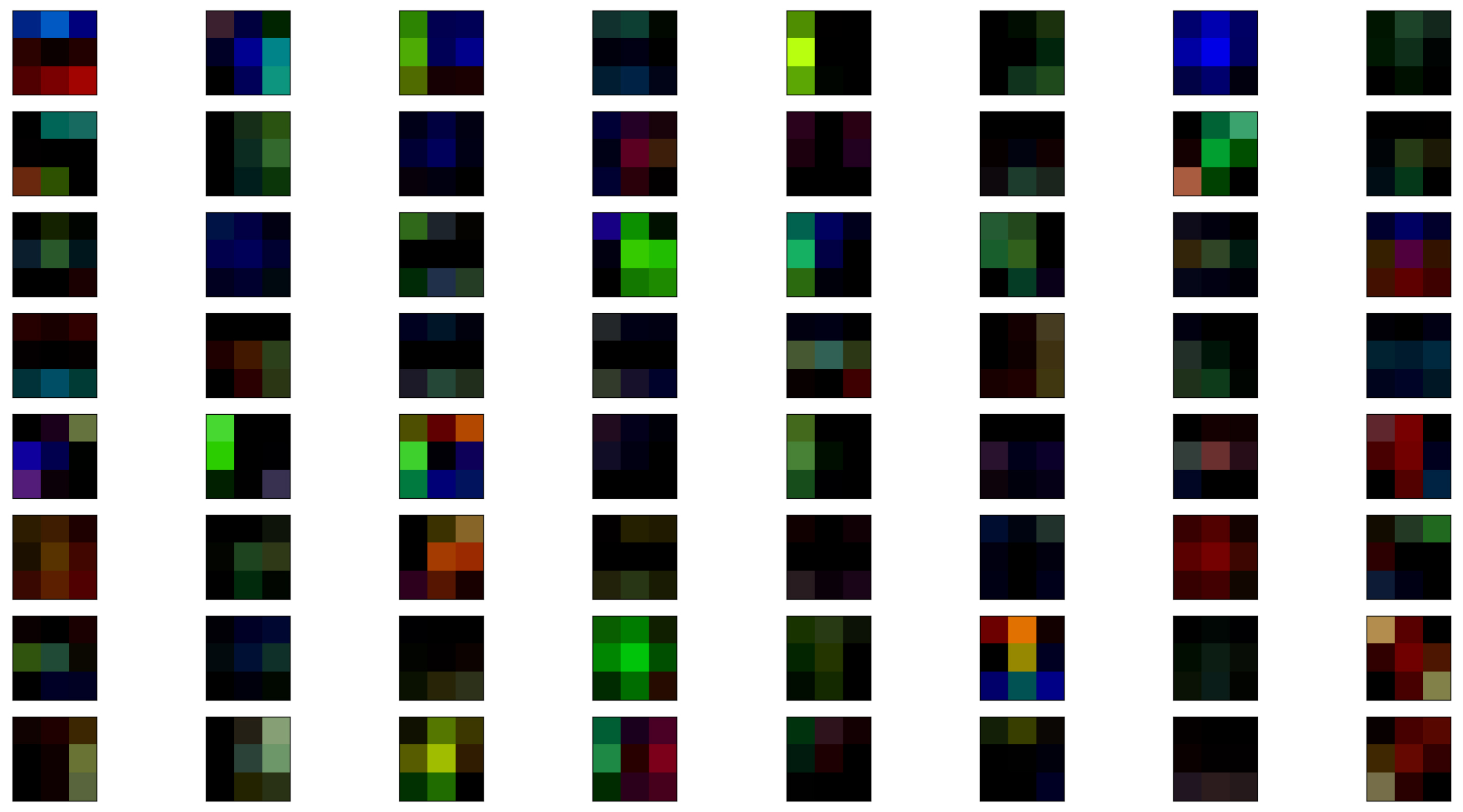
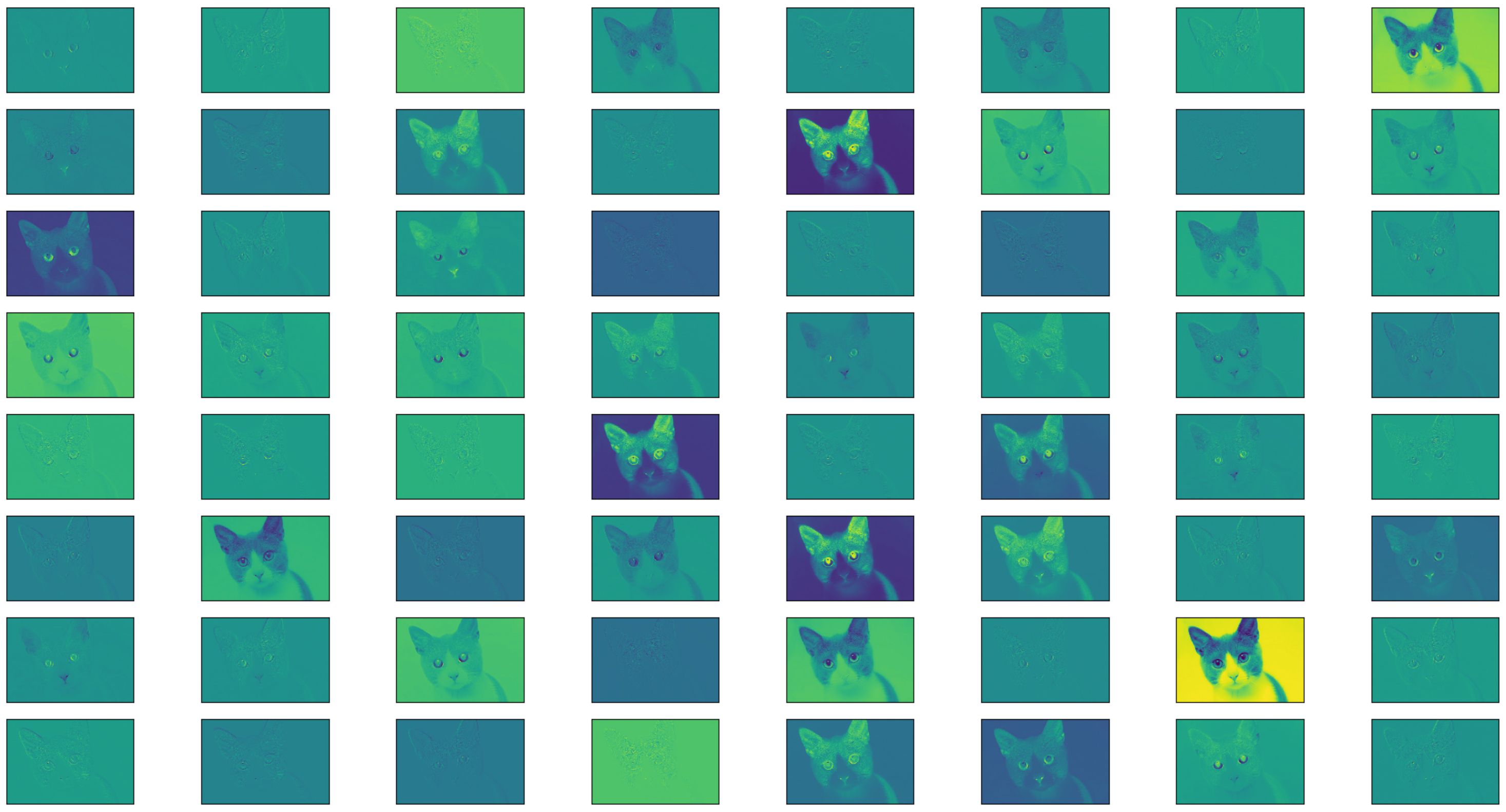
결과 이미지가 총 64인데, 이는 앞서 VGG의 구성 레이어를 살펴보면, 첫번째 레이어의 출력 채널수가 64개이기 때문입니다. 결과는 다음과 같습니다.
추가로 특정 레이어의 가중치값 역시 시각화가 가능합니다. 아래의 코드가 그 예입니다.
import matplotlib.pyplot as plt
from torchvision import transforms
from torchvision import models
from PIL import Image
vgg = models.vgg16(pretrained=True).cuda()
print(vgg.state_dict().keys())
weights = vgg.state_dict()['features.0.weight'].cpu()
fig, axes = plt.subplots(8,8)
for row in range(8):
for column in range(8):
axis = axes[row][column]
axis.get_xaxis().set_ticks([])
axis.get_yaxis().set_ticks([])
axis.imshow(weights[row*8+column])
plt.show()
9번 코드에서 가중치를 가지는 레이어의 ID를 출력해 주는데, 그 결과는 다음과 같습니다.
odict_keys([‘features.0.weight’, ‘features.0.bias’, ‘features.2.weight’, ‘features.2.bias’, ‘features.5.weight’, ‘features.5.bias’, ‘features.7.weight’, ‘features.7.bias’, ‘features.10.weight’, ‘features.10.bias’, ‘features.12.weight’, ‘features.12.bias’, ‘features.14.weight’, ‘features.14.bias’, ‘features.17.weight’, ‘features.17.bias’, ‘features.19.weight’, ‘features.19.bias’, ‘features.21.weight’, ‘features.21.bias’, ‘features.24.weight’, ‘features.24.bias’, ‘features.26.weight’, ‘features.26.bias’, ‘features.28.weight’, ‘features.28.bias’, ‘classifier.0.weight’, ‘classifier.0.bias’, ‘classifier.3.weight’, ‘classifier.3.bias’, ‘classifier.6.weight’, ‘classifier.6.bias’])
위의 레이어 ID로 가중치값을 가져올 레이어를 특정할 수 있는데요. 최종적으로 위의 코드는 다음과 같이 가중치를 시각화해 줍니다.